Collaborative Research: FW-HTF-RM: Robotic Teaching Assistant Systems for Nursing Instructors
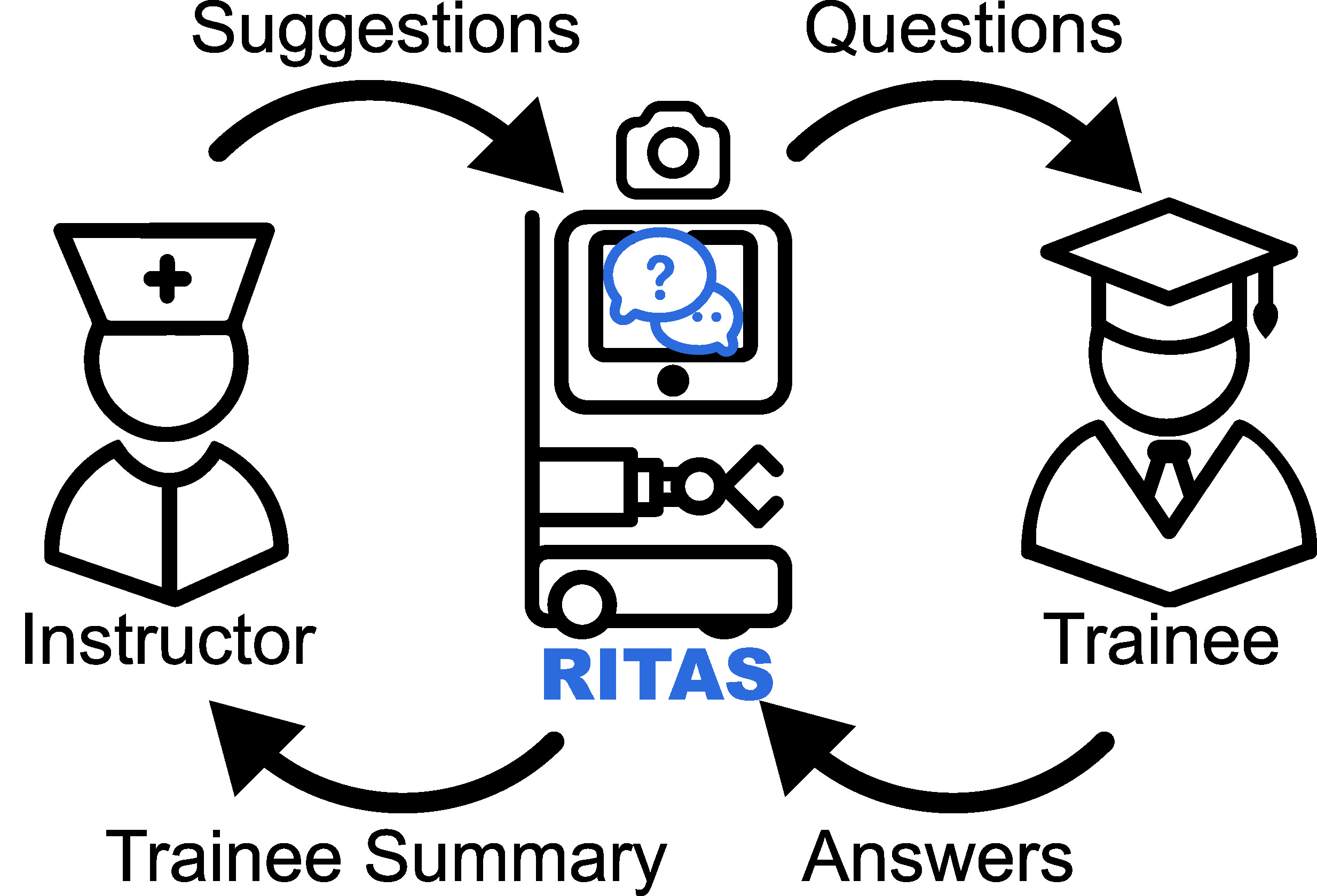
As the largest hospital workforce, registered nurses are essential to the overall stability of hospitals and play a vital role in delivering quality patient care. Nursing instructors are responsible for training and assessments of this workforce. The U.S. is experiencing a dire shortage of nurses, leading to significant turnover of nursing staff and an ever-growing need to train more nurses. As a result, the supply of nursing instructors has also outstripped demand. Meeting the nurse workforce training needs is a significant challenge. To address this challenge, this project proposes transformative mechanisms for human-technology partnership in nurse workforce training. The project’s overall goal is to design, develop, and evaluate the impact of RITAS, a robotic teaching assistance system, on the future of nurse workforce training. Through a symbiosis of virtual and embodied intelligence components, RITAS will assist nursing instructors in teaching routine nursing procedures by assessing trainees’ skills, reporting the assessment summaries to instructors, and delivering instructor-guided tutoring. The project will bring a transformative leap in intelligent tutoring robots: instead of relying solely on conversational interaction, RITAS will utilize its sensors and embodiment to verify and improve trainees’ physical skill execution. The project will quantify the impact of RITAS technology on nursing instructors’ performance and workload and nurse trainees’ learning outcomes. Our data will be derived through extensive human subject experiments conducted within ongoing nurse workforce training activities at a large hospital, which onboards over a thousand nurses per year. The project will also develop spatially-grounded models of nursing procedures and training environments. Through these worker-centered assessments and models, the project will inform the work design of future nursing instructors at the human-technology frontier.
This work has been supported by grant NSF DRL 2326390.
Related Publications
- P. Qian, F. Bajraktari, C. Quintero-Peña, Q. Meng, S. Hamlin, L. Kavraki, and V. Unhelkar, “ASTRID: A Robotic Tutor for Nurse Training to Reduce Healthcare-Associated Infections,” in Robotics: Science and Systems, 2025.
Details - Q. Meng, C. Quintero-Peña, Z. Kingston, V. Unhelkar, and L. E. Kavraki, “Perception-Aware Planning for Robotics: Challenges and Opportunities,” in 40th Anniversary of the IEEE International Conference on Robotics and Automation, 2024.
Details