Automated and Robotic Inspection of Flood Control Systems
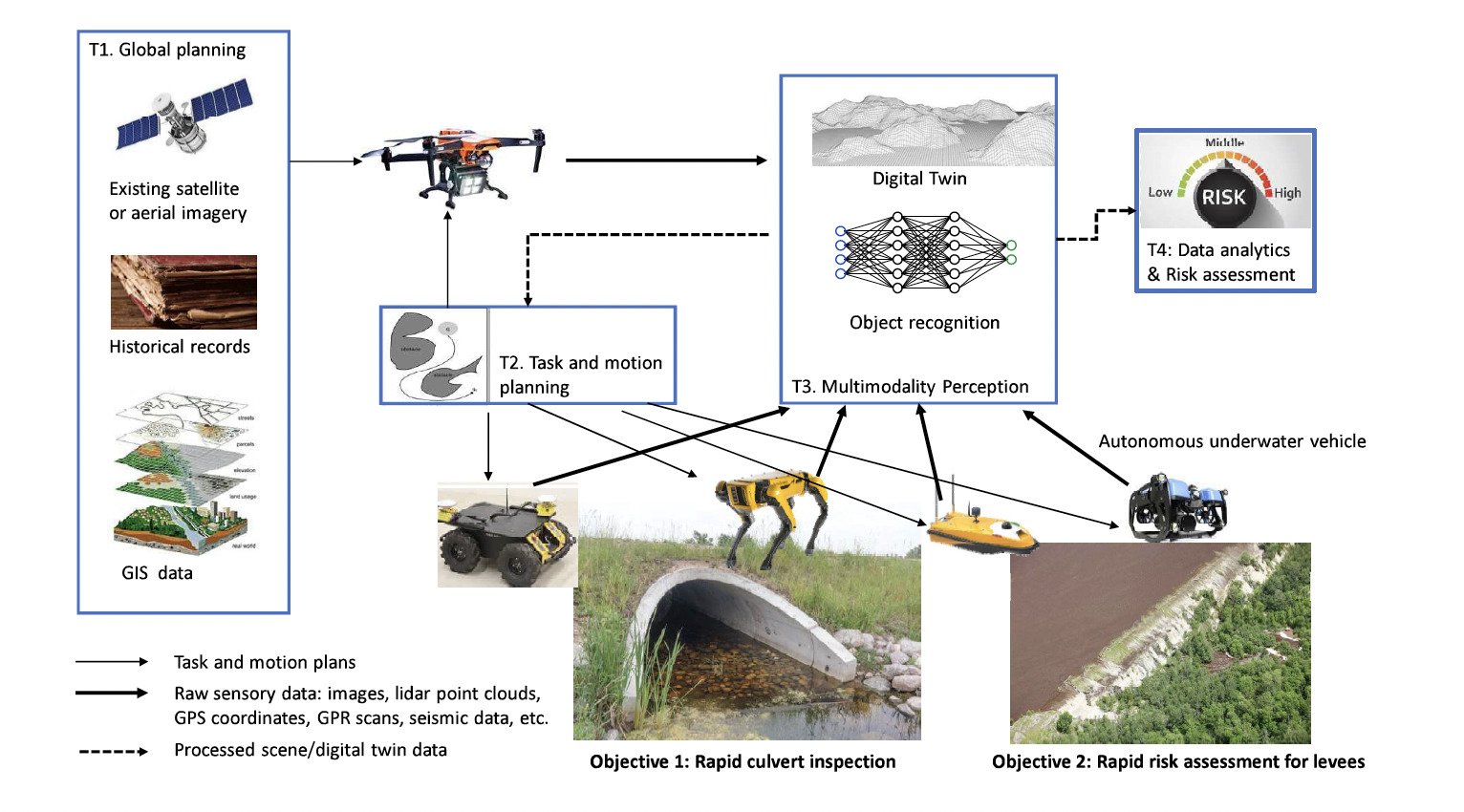
There are over 24,000 miles of levees, according to the National Levee Database, which could only represent 20% of levee assets. Periodical inspection and assessment of levee and culvert conditions are critical to preventing catastrophic disasters and ensuring safe operations. Unfortunately, frequent manual inspection is laborious, cost-prohibitive, and sometimes unsafe, especially while accessing hard-to-reach areas, making it challenging to obtain timely risk assessment of levee and culvert conditions in a flood management environment. Rapid culvert inspection and levee risk assessment are critical in ensuring the safe operation of modern flood control systems. This project investigates how to safely and robustly inspect large areas of levees and culverts by employing a team of heterogeneous robots, including unmanned aerial vehicles (UAVs), two types of unmanned ground vehicles (UGVs) that include both wheeled ground robots and legged ground robots to deal with different terrains, autonomous underwater vehicles (AUVs), and autonomous surface vehicles (ASVs). A typical deployment sequence would begin with a global planning phase where satellite/aerial imagery, historical records, and GIS data are used to identify the regions of interest and form an initial flight plan to direct a drone or multiple drones for a complete site survey. The image and/or lidar data from drones will provide better resolution information about the surveyed levees or culverts for us to identify close-up inspection regions. At that point, robot teams will be deployed to inspect using more powerful sensory modalities such as high-resolution images, multi-line lidars, impact-echo/seismic scans, and ground penetrating radars (GPRs) scans.
This work has been supported by grant DOD W912HZ2320003.
Related Publications
- T. Pan, C. K. Verginis, and L. E. Kavraki, “Robust and Safe Task-Driven Planning and Navigation for Heterogeneous Multi-Robot Teams
with Uncertain Dynamics,” in IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024, pp. 3482–3489.
Details